Collision Detection Robot
Autonomous obstacle-avoidance robot using ultrasonic sensing and real-time motor control — exhibited at Cummins & PICT College of Engineering
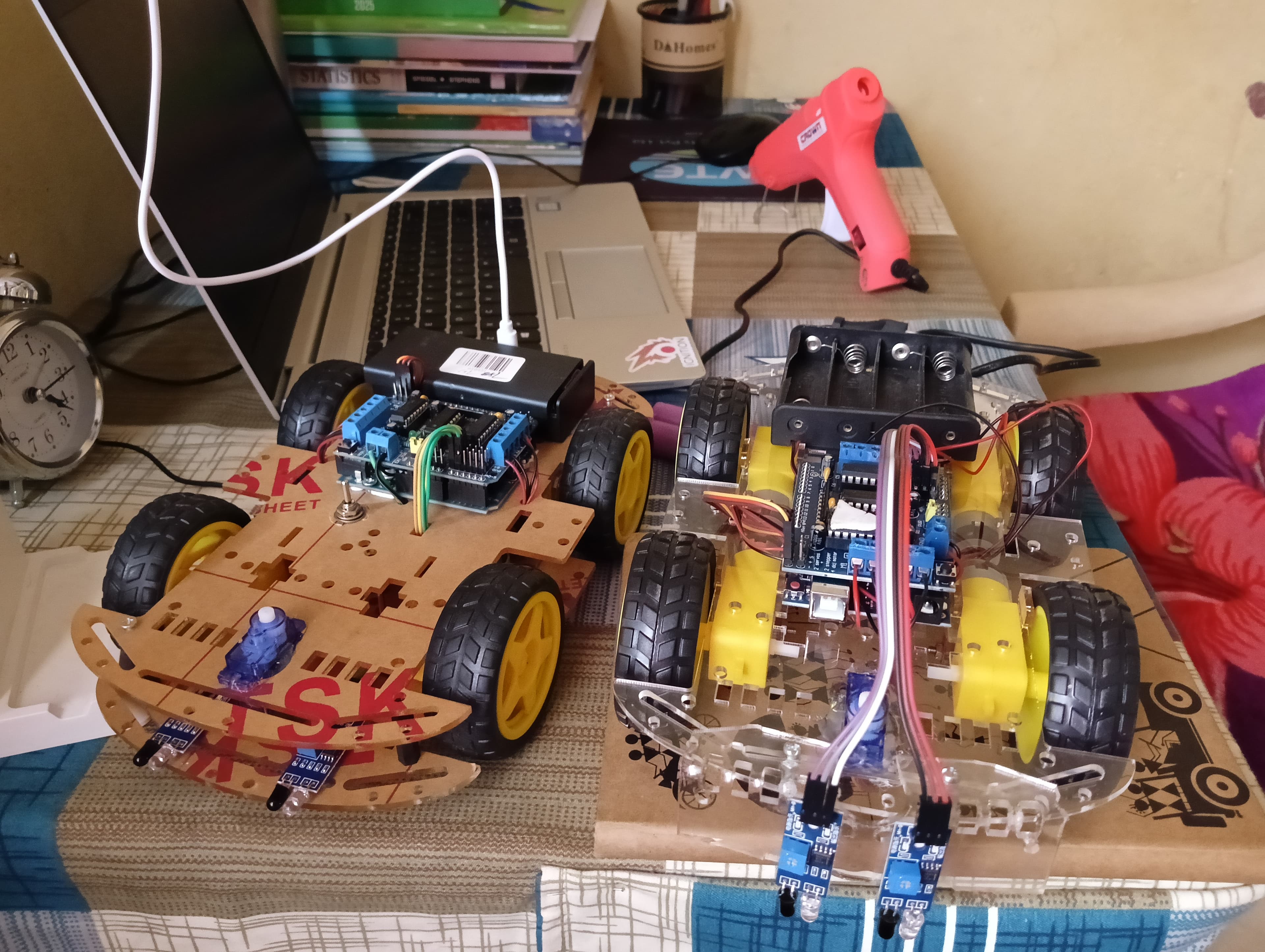
An autonomous collision detection and avoidance robot built from scratch using Arduino Uno, ultrasonic sensors, and a dual-channel motor driver. The robot continuously scans its surroundings and intelligently navigates around obstacles in real time without any human intervention.
The system uses an HC-SR04 ultrasonic sensor mounted at the front to emit sonar pulses and measure the time-of-flight of reflected signals. When an obstacle is detected within 20 cm, the microcontroller halts forward motion, activates a buzzer alert, and triggers reverse-and-turn maneuvers before resuming normal navigation.
The project was selected for exhibition at two prestigious engineering college events — Cummins College of Engineering (April 2025) and PICT College of Engineering (March 2025) — where it attracted significant interest from students and faculty for its clean engineering and real-world applicability.
┌──────────────────────────────┐
│ HC-SR04 Ultrasonic │
│ Trigger → Pulse → Echo │
└─────────────┬────────────────┘
│ Distance (cm)
┌─────────────▼────────────────┐
│ Arduino Uno │
│ distance < 20cm? │
│ YES → STOP + ALERT + TURN │
│ NO → FORWARD │
└──────┬──────────┬────────────┘
│ │
┌──────▼──┐ ┌────▼───────┐
│ L298N │ │ Buzzer+LED │
│ Motor │ │ Alert │
│ Driver │ └────────────┘
└──┬───┬──┘
│ │
┌──▼─┐ ┌▼───┐
│ M1 │ │ M2 │ ← Gear Motors (x4)
└────┘ └────┘
College Exhibitions
Showcasing the collision detection robot at prestigious engineering events.








